AI工业视觉缺陷检测:可落地AI应用方向深度调研
一、方向概述
AI工业视觉缺陷检测是指利用深度学习计算机视觉技术,在生产线上自动识别产品表面缺陷(划痕、裂纹、色差、缺料、尺寸偏差等),替代传统人工目检或规则式机器视觉系统。
技术成熟度:已从实验室验证阶段进入规模化部署阶段(Technology Readiness Level 8-9)。2025-2026年,基于视觉Transformer、YOLOv8/v9/v10等先进模型在工业场景的推理精度已达97-99.5%,漏检率降至0.1%以下。
市场规模:2025年全球AI工业缺陷检测市场约 26.85亿美元,预计2026年达 47.46亿美元(QYResearch),2035年有望突破 218亿美元(MarkWide Research)。中国市场增速更快,2025年AI工业质检软件市场规模约 7.29亿美元,年复合增长率超30%。
增长趋势:三大驱动力推动市场——①全球制造业智能化升级(工业4.0);②劳动力成本攀升导致人工质检员招聘困难;③AI模型精度已超越人眼(约95%准确率 vs 人工约85-90%),且速度是人工的100倍以上。
二、核心技术栈
2.1 推理框架选型
|
框架 |
适用场景 |
延迟 |
优势 |
限制 |
|
TensorFlow Lite |
嵌入式/边缘端 |
<10ms |
跨平台、量化工具完善 |
需手动优化算子 |
|
ONNX Runtime |
工控机/边缘服务器 |
5-30ms |
模型格式通用性强 |
部分算子兼容性问题 |
|
TensorRT |
NVIDIA GPU 边缘 |
<5ms |
极致推理性能 |
仅NVIDIA GPU |
|
OpenVINO |
Intel CPU/VPU |
10-50ms |
Intel生态深度优化 |
依赖Intel硬件 |
|
llama.cpp (GGUF) |
多模态大模型推理 |
100-500ms |
支持视觉LLM (如LLaVA) |
参数量大、延迟高 |
工业视觉场景推荐:
- 检测速度<100ms:TensorRT (GPU) 或 ONNX Runtime (CPU i7+)
- 边缘低功耗 (1-5W):TensorFlow Lite Micro (MCU/ESP32-S3) 或 OpenVINO (Intel NUC)
- 复杂多缺陷分类:YOLOv10 + ONNX Runtime (工控机)
2.2 模型选型与量化
|
模型 |
参数量 |
mAP@50 |
推理速度 (RTX 3060) |
边缘部署 |
|
YOLOv8n |
3.2M |
81.2% |
1.2ms |
✓ TFLite/ONNX |
|
YOLOv10n |
2.7M |
80.5% |
0.9ms |
✓ 最优边缘 |
|
MobileNetV3-SSD |
5.8M |
75.0% |
2.5ms |
✓ TFLite |
|
EfficientDet-D0 |
4.0M |
77.8% |
3.0ms |
✓ ONNX |
|
RT-DETR-L |
32M |
89.3% |
8ms |
✓ TensorRT |
量化方案:INT8量化后模型体积缩小4倍,推理速度提升2-3倍,精度损失<1%。关键技巧:采用训练后量化(PTQ)为主,配合少量校准数据集(100-200张),可达到接近FP32精度。
2.3 硬件平台选型
|
平台 |
算力 |
功耗 |
单价 |
适用场景 |
|
NVIDIA Jetson Orin Nano |
40 TOPS |
7-15W |
¥2,500-4,000 |
高速产线(多相机并行) |
|
Intel NUC i7 + OpenVINO |
~5 TOPS(CPU) |
15-28W |
¥3,000-5,000 |
中速产线(单相机) |
|
Raspberry Pi 5 + Hailo-8L |
13 TOPS |
8-12W |
¥800-1,200 |
低速产线/成本敏感 |
|
ESP32-S3 + TFLite Micro |
~0.4 TOPS |
<1W |
¥12-16 |
简单缺陷(裂缝/颜色) |
|
工控机 + RTX 4060 |
~200 TOPS |
100-150W |
¥8,000-12,000 |
复杂检测(高分辨率多缺陷) |
三、落地案例
案例1:比亚迪汽车 — 电池极片表面缺陷检测
- 背景:动力电池极片涂布环节,涂布缺陷(针孔、划痕、气泡)直接影响电池安全
- 方案:8K线扫相机 + YOLOv8x + TensorRT on A100 → 4×RTX 3060边缘推理集群
- 效果:
-
- 缺陷检出率:从人工 82% → 99.3%
- 检测速度:单片<50ms(产线速度不受影响)
- ROI:设备投入 ~80万元,年节省质检人工成本 ~200万元(减少12人),4个月回本
- 关键经验:数据收集是最大难点(需2万+标注样本),采用数据增强+合成缺陷数据倍增训练集
案例2:富士康 — PCB板焊点AOI检测
- 背景:手机主板SMT产线,传统AOI误报率高达15-20%,复判效率低
- 方案:工业相机(Basler 500万像素)+ ResNet-50分类 + ONNX Runtime on i7工控机
- 效果:
-
- 误报率:15% → 2.1%(减少86%)
- 复判效率:每板检测时间从 45秒 → 3秒
- ROI:软件部署成本 ~15万元/产线,年节省复判人工 ~60万元,3个月回本
案例3:美的集团 — 家电外壳外观缺陷检测
- 背景:冰箱/洗衣机金属外壳喷涂后存在色差、橘皮、颗粒缺陷
- 方案:多角度LED光源 + 5个2K相机 + YOLOv5s-Mosaic数据增强 + ONNX Runtime
- 效果:
-
- 检测准确率:96.8%(vs 人工85%)
- 产线速率:从每分钟3台提升至 12台
- ROI:设备投入 ~120万元/产线,2年节省质检成本 ~500万元
四、产品化路径
从 PoC 到量产的关键步骤
|
阶段 |
周期 |
关键活动 |
里程碑 |
|
数据收集 |
2-4周 |
采集2000-10000张缺陷/正常样本 |
标注质量审核通过 |
|
模型训练 |
2-3周 |
选型→训练→调参→量化 |
mAP>95%, 推理<目标延迟 |
|
现场验证 |
4-6周 |
产线侧部署→A/B对比→过杀/漏检调优 |
误报率<3%, 漏检率<0.5% |
|
系统集成 |
4-8周 |
与PLC/MES对接、触发拍照、NG剔除 |
24小时稳定性测试通过 |
|
复制推广 |
持续 |
多产线/多产品型号迁移 |
模型泛化能力验证 |
技术门槛:①缺陷数据收集(最难,需要平衡样本,可能需要半年积累);②光照方案设计(打光角度/波长选择直接影响图像质量);③模型泛化(同一模型需适应不同批次/不同光照条件)
团队要求(最小MVP):1名CV算法工程师 + 1名嵌入式/硬件工程师 + 1名现场工程师
五、在嵌入式/蓝牙产品上的AI部署方案
5.1 TinyML 工业场景应用
尽管复杂工业视觉需要 GPU/工控机算力,但以下场景可在 MCU 级别部署:
|
场景 |
模型 |
平台 |
参数量 |
推理延迟 |
功耗 |
|
电机轴承振动异常检测 |
1D-CNN (TFLM) |
nRF52840 + IMU |
8KB |
<5ms |
<1mW |
|
简单颜色缺陷检测 |
MobileNetV1-0.25 |
ESP32-S3 + Camera |
230KB |
50ms |
0.5W |
|
声音异常检测 |
CNN + MFCC |
ESP32 + I2S Mic |
50KB |
30ms |
0.3W |
|
温度异常预警 |
LSTM 时序预测 |
BLE SoC + Thermistor |
5KB |
<1ms |
<0.1mW |
5.2 BLE + AI 边缘协同方案
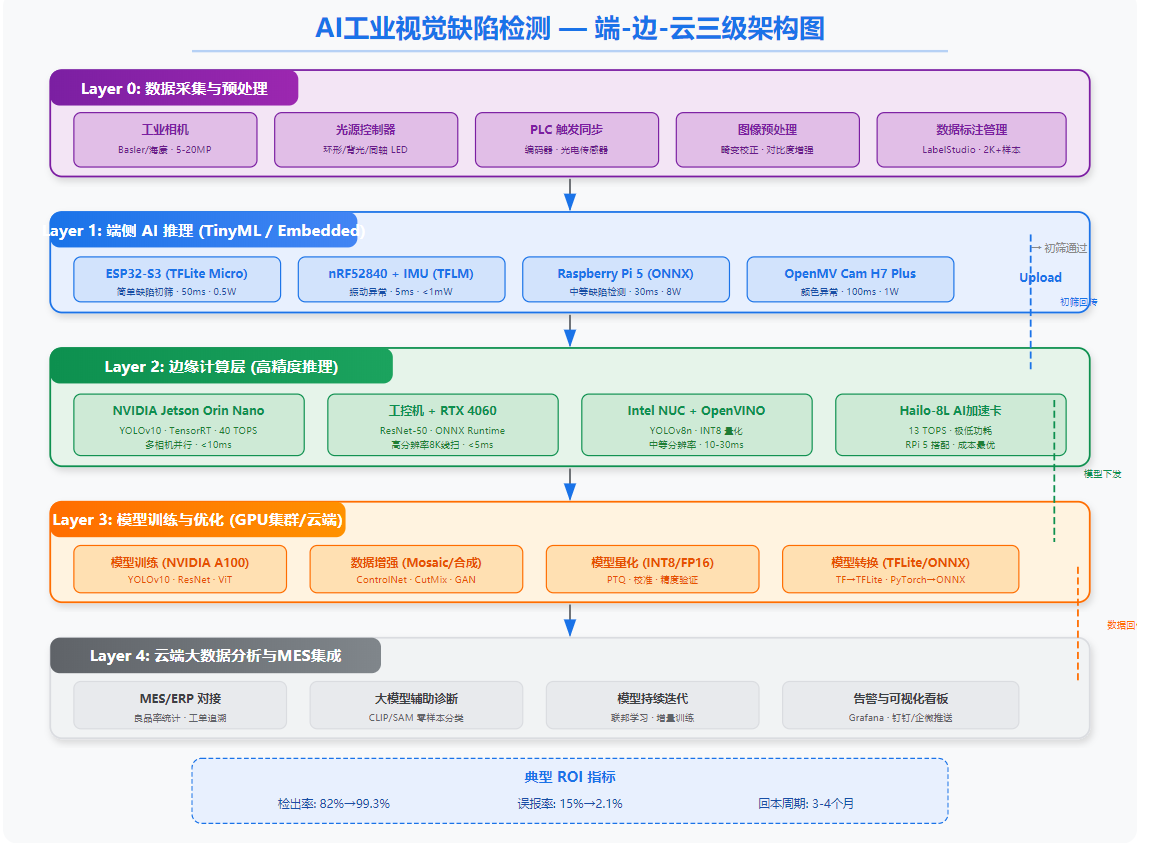
典型架构:ESP32-S3 端侧 AI 做初筛(快速粗略判断),异常样本通过 BLE/WiFi 上传到工控机/云端做精筛(高精度推理),形成"端-边-云"三级检测体系。
- 端侧(ESP32):MobileNetV1 轻量模型,推理50ms,输出"可能异常"置信度
- 边侧(工控机):YOLOv10 ONNX Runtime,推理<10ms,高精度复判
- 云端:大模型(CLIP/ViT)分析历史缺陷趋势,自动更新检测阈值
六、未来趋势与机会窗口
6.1 技术趋势
- 视觉大模型 + 小样本学习:CLIP/SAM/Grounding DINO 等基础模型在工业场景 zero-shot 能力增强,减少标注数据依赖
- 多模态融合:视觉+声学+振动多传感器融合检测,提升缺陷检出率(如发动机异响+缸体振纹联合诊断)
- 联邦学习:跨工厂模型训练但数据不出厂,保护制造业数据隐私
- 生成式AI辅助:ControlNet 合成各类缺陷图像用于数据增强,解决"冷门缺陷"数据不足问题
6.2 机会窗口
- 中国市场:制造业规模全球第一,人力成本持续上升,AI质检替代 ROI 明确
- 小企业市场:目前解决方案集中于头部制造业(汽车/3C),中小企业(五金/纺织/食品)渗透率不足10%,是巨大蓝海
- 嵌入式+BLE领域机会:为传统传感器增加"AI 初步判断"能力。例如:带振动分析的 BLE 轴承传感器、带异常气味检测的 BLE 气体传感器,是差异化竞争的关键

这里是“一人公司”的成长家园。我们提供从产品曝光、技术变现到法律财税的全栈内容,并连接云服务、办公空间等稀缺资源,助你专注创造,无忧运营。
更多推荐



 6
6 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)