转速电流双闭环直流调速系统仿真之旅:MATLAB/Simulink实现
转速电流双闭环直流调速系统仿真,电流环仿真,转速环仿真,MATLAB/Simulink 教材4-5节PWM系统转速电流双闭环直流调速系统仿真,包括m文件,电流环单闭环仿真,转速电流双闭环仿真。 软件版本:MATLAB2015b及以上 有仿真报告一份,包括教材4-5节中涉及的仿真原理,模型建立过程,仿真过程,仿真结果分析等。 内容与上述描述一致
在自动化控制领域,转速电流双闭环直流调速系统是极为经典且重要的存在。今天咱就聊聊如何通过MATLAB/Simulink对其进行仿真实现,涉及电流环仿真、转速环仿真等关键部分,软件版本要求MATLAB2015b及以上哦。
电流环单闭环仿真
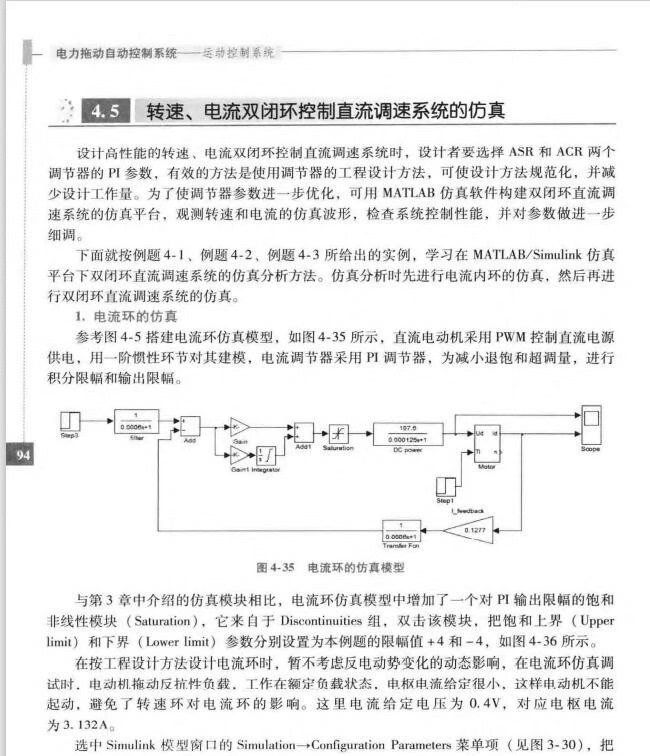
电流环在整个调速系统里扮演着快速跟随给定电流变化的重要角色。在MATLAB/Simulink搭建电流环单闭环仿真模型时,我们先得明确其基本构成要素。
代码实现与分析
以下是简单的m文件片段来设置电流环的一些参数(假设简单的PI控制器参数设置):
% 电流环PI控制器参数设置
kp_i = 0.5; % 比例系数
ki_i = 0.1; % 积分系数这里kpi和kii的取值,kpi决定了系统对误差的快速响应程度,较大的kpi能使电流快速跟踪给定,但可能导致超调;ki_i则用于消除稳态误差,让系统在稳定运行时电流精确跟踪给定值。
在Simulink模型中,将电流传感器采集到的电流信号与给定电流信号做差,差值输入到PI控制器,PI控制器的输出再去控制功率变换器等后续环节。这个过程就像给系统装上了一双“眼睛”和一个“智能大脑”,眼睛时刻盯着电流的实际值与给定值的差异,大脑(PI控制器)则根据这个差异调整输出,让实际电流快速且准确地跟随给定电流。
转速电流双闭环仿真
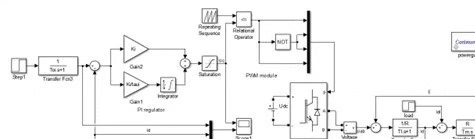
转速电流双闭环系统,是在电流环的基础上增加了转速环,实现对电机转速的精确控制。转速环就像是整个系统的“指挥官”,给出电机运转速度的“命令”。
代码实现与分析
同样在m文件里设置转速环PI控制器参数:
% 转速环PI控制器参数设置
kp_n = 1;
ki_n = 0.05; kpn对于转速环来说,影响着系统对转速误差的响应速度,能快速地让电机的转速朝着给定转速靠近;kin则保证在电机稳定运行时,转速能准确地维持在给定值,不会出现偏差。
转速电流双闭环直流调速系统仿真,电流环仿真,转速环仿真,MATLAB/Simulink 教材4-5节PWM系统转速电流双闭环直流调速系统仿真,包括m文件,电流环单闭环仿真,转速电流双闭环仿真。 软件版本:MATLAB2015b及以上 有仿真报告一份,包括教材4-5节中涉及的仿真原理,模型建立过程,仿真过程,仿真结果分析等。 内容与上述描述一致
在Simulink搭建的转速电流双闭环模型中,转速传感器采集的电机实际转速信号与给定转速信号比较后输入转速环PI控制器,其输出作为电流环的给定值。如此一来,转速环通过调整电流环的给定,间接地控制电机的转速,实现了更精确、更稳定的调速控制。
仿真报告相关要点
仿真原理
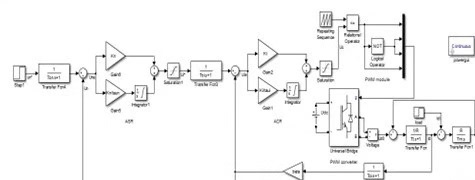
转速电流双闭环直流调速系统的原理,简单说就是转速环处于外环,负责稳定转速,电流环在内环,快速跟随转速环给出的电流给定,两者协同工作,确保电机在不同工况下都能高效、稳定运行。
模型建立过程
在MATLAB/Simulink里,从基本的模块库中拖拽出电源模块、电机模型模块、传感器模块、PI控制器模块等,按照系统的原理结构连接起来。比如,将电源连接到电机,电机输出转速和电流分别连接到转速传感器和电流传感器,传感器输出连接到对应的PI控制器等等,逐步搭建出完整的仿真模型。
仿真过程
设置好仿真参数,如仿真时间、步长等,然后运行仿真。在仿真过程中,系统会根据我们搭建的模型和设置的参数,实时计算各个环节的变量值,模拟电机实际的运行情况。
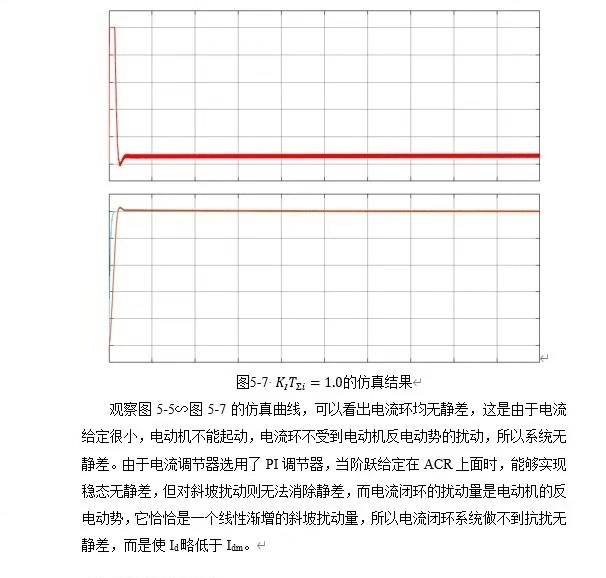
仿真结果分析
通过观察仿真结果,我们可以看到电机的转速和电流如何响应给定信号。比如,转速是否能快速稳定到给定值,有没有超调;电流在启动、调速过程中的变化情况等。若转速超调过大,可能需要调整转速环PI控制器参数;若电流响应不及时,那就得看看电流环PI参数是否合适。通过不断分析和调整,优化整个调速系统的性能。
总之,通过MATLAB/Simulink对转速电流双闭环直流调速系统进行仿真,能让我们更直观地理解系统的工作原理,快速验证和优化控制策略,为实际工程应用打下坚实基础。

这里是“一人公司”的成长家园。我们提供从产品曝光、技术变现到法律财税的全栈内容,并连接云服务、办公空间等稀缺资源,助你专注创造,无忧运营。
更多推荐


 2
2 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)